

Ijraset Journal For Research in Applied Science and Engineering Technology
A Mobile App Driven Smart Ball Launch System for Solo Sports Training
Authors: Srushti Patil, Sejal Pembarti, Sakshi Sarpe, Yukta Saraf, Jitendra Gaikwad
DOI Link: https://doi.org/10.22214/ijraset.2024.62185
Certificate: View Certificate
Abstract
In today\'s world, athletes face intense competition in a variety of sports, but there are few opportunities for them to practice or evaluate their performance on their own, making it difficult for them to grow. Thus, a system is proposed in this paper that allows players to conveniently practice alone without requiring human assistance and may also help them in analyzing their skills. The method mostly concentrates on tennis game. The automatic ball launches for practice is the main aim of the system. With the assistance of a Node MCU that can interact over the internet, the system gives the user exact control over when to launch balls, what kind of ball to launch, and how to launch them remotely. Which is possible on mobile devices due to Blynk app interface. Typically, the system offers three different ball launch types: over spin, backspin, and rapid ball launch. It also allows for exact speed control of the motors used to make the ball launch.
Introduction
I. INTRODUCTION
In the dynamic world of sports and leisure, technological innovations constantly push the limits of achievable goals. Numerous players pursue their training independently, deprived of the advantages of engaging and effective training interactions. This project stems from the aspiration to empower solo players, equipping them with the tools to assume control of their training sessions and improve their skills. The Smart Ball Launch System project exemplifies this trend, seamlessly blending technology with athletics to elevate the training experience for both athletes and recreational enthusiasts. With the help of the innovative Mobile App Driven Smart Ball Launch System, athletes can train one-on one and improve their performance while learning the variation of individual sports.
During training, solo athletes frequently struggle with a lack of feedback and analysis. The Smart Ball Launch System aims to close this gap and provide a dynamic and engaging training environment by seamlessly fusing an advanced ball launch mechanism with a smartphone app. Specifically crafted for individuals who enjoy playing sports alone, this system aims to improve abilities, encourage progress, and offer insightful information on performance indicators. As we enter the mobile app-driven solo sports training era, the Mobile App-Driven Smart Ball Launch System stands out as an excellent innovation. This system creates new opportunities for athletes to push their limits, showcase their talents, and go on a journey of continual improvement. Node MCU, a robust and adaptable microcontroller, forms the core of this system. When combined with DC Motors and the L298N Motor Driver, this combination creates a strong foundation for a ball launch mechanism. With its Wi-Fi capabilities, the Node MCU connects the athlete's smartphone app and the physical launcher seamlessly. In sports training, control and precision are crucial. The Node MCU controls the DC Motors, which enables precise and programmable ball launches. The Mobile App-Driven Smart Ball Launch System outfitted with the Node MCU microcontroller, DC motors, and the L298N Motor Driver, has the potential of seamlessly combining the domains to elevate athletic performance to new heights as we venture into the technological advancements in solo sports training.
II. RELATED WORK
[1] Ferenc Kovács, Gábor Hosszú: “Highly Accurate Tennis Ball Throwing Machine with Intelligent Control”. The goal of this paper is to provide a more rigorous and realistic training environment and improve the functioning and accuracy of tennis ball throwing machines. The intelligent control system's mathematical computations and theoretical foundation are the main topics of this study. A practical implementation may include choosing and incorporating appropriate sensors, creating algorithms for analyzing data in real time, and making control changes. As an outcome, the system evaluates the possibility of a failure and modifies the stroke parameters and it is applicable for stored data also. In the proposed system, using the ball spread and accounting for it while determining the incredibly flat professional strokes is implemented.
[2] Alexander Dittrich, et.al: “AIMY: An Open-source Table Tennis Ball Launcher for Versatile and High-fidelity Trajectory Generation”. The study proposes AIMY (Advanced Intelligent Machine for Yourself), an open-source table tennis ball launcher ability to precisely control ball speed, spin, and launch trajectory. Ball trajectories are captured at 200 frames per second by four high-speed optical cameras, allowing for testing and fine-tuning to suit the demands of regulated training settings. AIMY is more accurate than solutions that are available commercially, and it also provides remote APIs, which are essential for embedding in an RL environment. We studied the technical aspects of the design, such as the hardware components and how they are assembled also features in the software that regulate launch settings.
[3] LUOYANG, et.al: “Ball Motion Control in the Table Tennis Robot System Using Time-Series Deep Reinforcement Learning”. The objective of the paper is to utilise deep reinforcement learning, and teach the robot how to strike table tennis balls with efficiency. Within this research, a DRL-based method that requires the approaching ball's spin velocity into account is proposed for table tennis ball play. It may also be used to satisfy DRL-type approaches' demand for data variety. The two primary parts of the robotic racket control (action policy network) are the LSTM network and the deploy function (racket motion generator). In actual implementation, the deploy function is utilized for the generation of racket motion, and the LSTM is utilized to anticipate the ball state as it approaches. Complex dynamics involved in ball trajectory and spin are the aspects of the proposed system.
[4] Foo Shi Wei, et.al: “Design and develop of an automated tennis ball collector and launcher robot for both able-bodied and wheelchair tennis players – ball recognition system”. The creation of a robot assistant that can gather tennis balls that are scattered all over the court and launch them back to the player for endless play of the able-bodies as well as wheelchair tennis players is the main aspect of this paper. Using tennis balls' characteristic yellow colour for easy recognition is proposed. Image processing is the application of algorithms to determine the dimensions and forms of things within the robot's range of vision. The phases of software development were color segmentation, the Hough Transform, input image selection, and system integration. In the end, a functional Ball Recognition System was implemented.
[5] Zulkifli Ahmad, et.al: “A low-cost automated table tennis launcher”. The goal of this paper is to make use of easily accessible parts, such as the Arduino microcontroller, which serves as the system's brain. Sensors identify the existence of the ball and Motors or servos manage the launch system. The system makes use of sensors to automatically activate the launcher upon the placement of a ball within the feeding mechanism. The accuracy and range of the launcher may be restricted in comparison to more sophisticated devices. Thus, in our project, we have incorporated more accurate ball tracking and aiming.
[6] Cristian García Bauz et.al.: “A Tennis Training Application Using 3D Gesture Recognition”. The system uses sensors to record the player's 3D movements while they execute tennis strokes, most likely gyroscopes or accelerometers. The program examines the recorded data to identify particular tennis strokes (serve, backhand, forehand, etc.) and analyses the player's approach using predetermined standards. For precise movement capture, the selection of sensors and the whereabouts on the player's body are critical. To decipher sensor data and categorize player gestures into distinct tennis strokes, algorithms are required. The system displays statistics like speed, bound position, and comparisons with past data, and it can differentiate between various user shots.
III. PROPOSED SYSTEM
The proposed system is specifically created for players looking for a fully adjustable and self-governing practice environment, the System represents a technological advance in tennis instruction. It offers an innovative method of practicing alone by giving users total control over the characteristics of the tennis ball launch. The proposed strategy consists of using a mobile application to operate the ball launch system remotely. The application allows to control the speed of both motors used for launch and to turn the system on and off. It also includes built-in buttons for over spin and backspin by adjusting speed, eliminating the need for the user to repeatedly go close to the system to adjust the speed or launch. To put the system into operation following components have been used:

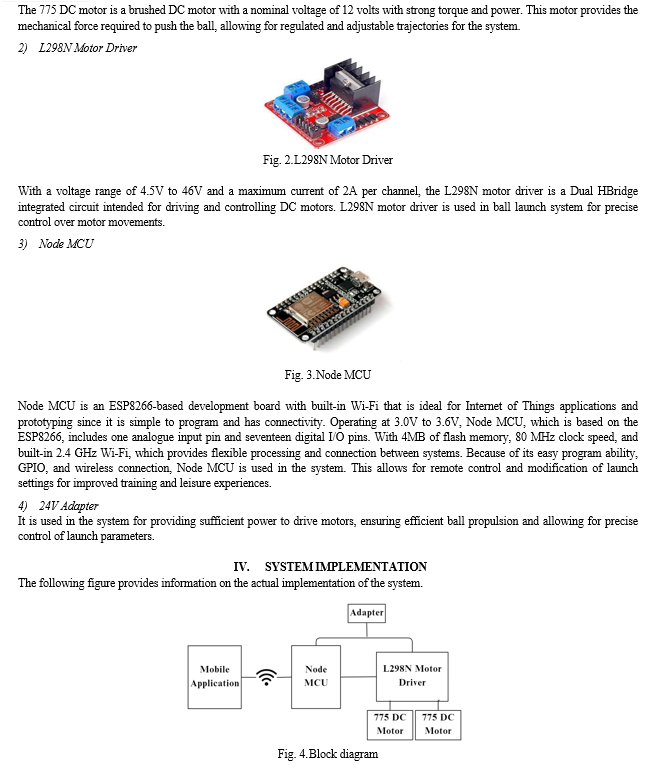
The motor driver in Fig. 4 is linked to the two motors, which are powered by an adapter that provides continuous voltage to the motors and 5 volts to the Node MCU. This allows the motors to be controlled for speed and direction. The mobile app in use is Blynk App. Blynk is an IOT platform that enables users to remotely control and monitor hardware projects through customizable mobile applications. With the help of Node MCU and the Blynk software, a complex Internet of Things configuration for ball launcher is built. Through a smartphone app, Blynk offers an intuitive interface that makes remote control and online monitoring possible. By only engaging with the software on their smartphones, wireless control of the motor of the ball launcher is possible through users. The actual ball launcher and the Blynk app are connected via Node MCU over internet. Through communication with the Blynk server, users issue remote instructions. The two motors are positioned vertically one above the other with a small gap between them to allow for a ball launch. The system has three inbuilt functions, the first is quick ball launch; the second is back spin; and the third is over spin. Under all circumstances, it is imperative that the motors rotate in opposing directions for the launch. A quick ball launch occurs if both motors spin quickly. Back spin ball is launched if the motor placed above rotates at a low speed and the motor placed below rotates at a high speed. When the motor placed above rotates at maximum speed and the motor placed below rotates at a low speed, the over spin ball is launched.
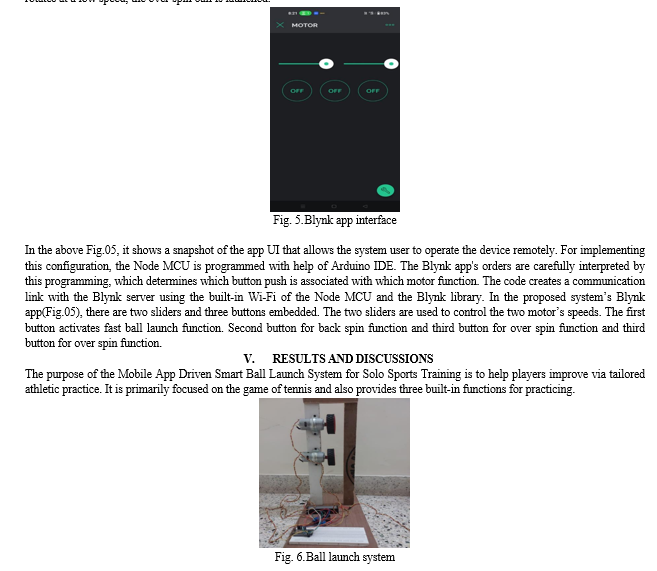
The system's actual implementation is depicted in Fig. 6. In order to ensure that there is no obstacle between launches, the two motors for the ball launch are precisely positioned one below the other. The motor driver and a micro-controller that are coupled to the motors are mounted below. Plywood is placed below the wooden bars that are used to mount the motors and other components. Because of this setup, the ball may be launched at three distinct functions: back spin, over spin, and quick ball launch. The user can regulate this by using the Bynk app.
VI. FUTURE SCOPE
In the future, it might be possible to integrate a wristband into the existing system. The band would have every characteristic of the current system. The band may also be able to manage ball launches to increase user comfort by identifying hand movements using the gesture sensor integrated into the band and connecting to the ball launcher via wi-fi.
Conclusion
A mobile app-controlled ball launch system was created to meet the needs of players who want to practice by themselves, without the need of other players, as well as those who want to examine their own shortcomings by retrying a certain ball launch type function again and again. And most importantly, the system provides all of this control via a mobile device, allowing the user to operate remotely rather than constantly approaching the system and changing its setup.
References
[1] F. Kovács, G. Hosszú , Published 1 August 2015,Computer Science, Engineering ,“Highly Accurate Tennis Ball Throwing Machine with Intelligent Control” World Academy of Science, Engineering and Technology, International Journal of Mechanical, Aerospace, Industrial, Mechatronic and Manufacturing Engineering [2] Dittrich, Alexander & Schneider, Jan & Guist, Simon & Schölkopf, Bernhard & Buechler, Dieter. (2022). “AIMY: An Open-source Table Tennis Ball Launcher for Versatile and High-fidelity Trajectory Generation”. 10.48550/arXiv.2210.06048. [3] Yang, Luo & Zhang, Haibo & Zhu, Xiangyang & Sheng, Xinjun. (2021). “Ball Motion Control in the Table Tennis Robot System Using Time-Series Deep Reinforcement Learning”. IEEE Access. PP. 1-1. 10.1109/ACCESS.2021.3093340. [4] Foo, Shi Wei (2012).“Design and develop of an automated tennis ball collector and launcher robot for both able-bodied and wheelchair tennis players - ball recognition systems”. Final Year Project, UTAR. [5] Foo, Shi Wei (2012).“Design and develop of an automated tennis ball collector and launcher robot for both able-bodied and wheelchair tennis players - ball recognition systems”. Final Year Project, UTAR. [6] Ponnusamy, Barath & Fei Yong, Wong & Ahmad, Zulkifli. (2015). “A low cost automated table tennis launcher”. Journal of Engineering and Applied Sciences. 10. 6. [7] Cristian García Bauz et.al.: “A Tennis Training Application Using 3D Gesture Recognition” .Articulated Motion and Deformable Objects, 2012, Volume 7378 ,ISBN : 978-3-642-31566-4 [8] Chinchmalatpure, Sheela & Pingle, Jayesh & Sarpe, Sakshi & Pembarti, Sejal & Saraf, Yukta. (2023). “IOT Based Smart Food Dehydration and Grinder System for Agricultural Usage.” 1-5. 10.1109/ICCUBEA58933.2023.10392137. [9] Su, Hu & Fang, Zaojun & Xu, De & Tan, M.. (2013). “Trajectory Prediction of Spinning Ball Based on Fuzzy Filtering and Local Modeling for Robotic Ping–Pong Player.” Instrumentation and Measurement, IEEE Transactions on. 62. 2890-2900. 10.1109/TIM.2013.2263672. [10] Bideau B, Kulpa R, Vignais N, Brault S, Multon F, Craig C. “Using virtual reality to analyse sports performance.” IEEE Computer Graphics Application. 2010 Mar-Apr;30(2):14-21. doi: 10.1109/MCG.2009.134. PMID: 20650707. [11] A P Singh, A K Jain & P Mahajan. (2016). “design and fabrication of a ball projecting machine”. Journal of Advance Research, and Innovation, 4(3), 587-590. [12] Sathiyaseelan, U. Aravindh. (2021). “Design and fabrication of soccer shooting machine” , International Journal of Mechanical Engineering and Technology. e-ISSN: 2395-0056 Volume: 08 Issue: 07 ,July 2021 p-ISSN: 2395-0072 [13] Perumalsamy, S & Ponnusamy, Ragupathi & KR, Rahul. (2018). “Design and Development of Volley Ball Practice Machine.”. International Journal of Latest Trends in Engineering and Technology (IJLTET), 4(1), 144-156. [14] Tomac, Mike. (2000). “The ``holey\'\' ball launcher”. The Physics Teacher. 38. 75-75. 10.1119/1.880458. [15] GOODWILL, S. R., CHIN, S. B. and HAAKE, Steve (2004). “Aerodynamics of spinning and non-spinning tennis balls” . Journal of wind engineering and industrial aerodynamics, 92 (11), 935-958 [16] K. Wójcicki, K. Puci?owski, and Z. Kulesza, “Mathematical Analysis for a New Tennis Ball Launcher,” Acta Mechanical et Automatica, vol. 5, no. 4, pp. 111–118, 2011, 45C, 15-351 [17] Choi, Hujae & Jung, Woohyun & Kim, Nakwan. (2017). “Development of autonomous ball launcher system on surface vehicle for detect and deliver mission in 2016 Maritime Robot X Challenge.” 1-5. 10.1109/UT.2017.7890313. [18] Mastaneh Mokayef, M.K.A Ahamed Khan, MHD Amen Summakieh, Lee Qi Jian, Miad Mokayef “Embedded Ball Launcher with Trajectory Path Analysis for Empowering Junior Table Tennis Players” Journal of Advances in Artificial Life Robotics , Vol. 4(1); June (2023), pp. 27–34 , ON LINE ISSN 2435-8061; ISSN-L 2435-8061
Copyright
Copyright © 2024 Srushti Patil, Sejal Pembarti, Sakshi Sarpe, Yukta Saraf, Jitendra Gaikwad. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62185
Publish Date : 2024-05-15
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online